
by Billy Robinson (Winner of the UROS 2019 Dean’s Award for Outstanding Research) //
 LiPo and Li-ion batteries are currently considered the modern standard in Battery Electric Vehicles (BEVs). Both battery technologies have their pros and their cons, as all technologies do. However, they both share a common disadvantage and that is limited specific power despite having high specific energy.
LiPo and Li-ion batteries are currently considered the modern standard in Battery Electric Vehicles (BEVs). Both battery technologies have their pros and their cons, as all technologies do. However, they both share a common disadvantage and that is limited specific power despite having high specific energy.
Specific energy is the measure per kg of how much energy can be stored, whereas specific power is the measure per kg of how much power an Electrical Energy Store (EES) can supply. Supercapacitors however have higher specific power but limited specific energy.
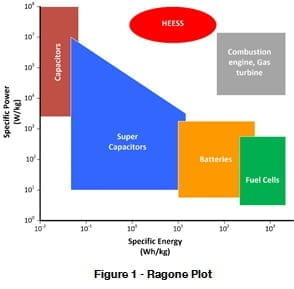 In this project, it has been proposed that a Hybrid Electrical Energy Storage System (HEESS), relying on both batteries and supercapacitors, can be developed that can provide higher specific power and energy than relying on just one EES. This is illustrated in Fig.1.
In this project, it has been proposed that a Hybrid Electrical Energy Storage System (HEESS), relying on both batteries and supercapacitors, can be developed that can provide higher specific power and energy than relying on just one EES. This is illustrated in Fig.1.
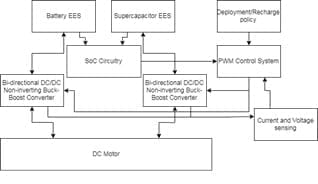
The aim of the project was to design and then simulate a typical HEESS suitable for integration into a BEV. This began by identifying the components of the system and how they would interact using a block diagram (Fig.2) before expanding on each block by developing the necessary circuitry.
 After developing all the required circuitry, the system was modelled and simulated using Simulink to provide proof of concept. Before efforts then shifted to building a scaled model using the LTC3112 to further validate the concept.
After developing all the required circuitry, the system was modelled and simulated using Simulink to provide proof of concept. Before efforts then shifted to building a scaled model using the LTC3112 to further validate the concept.
Throughout the project there were several key challenges to face in developing the system. One of these challenges was in the pulse width modulation (PWM) control system which operated the switching of the 4 MOSFETs in the buck-boost converters (Fig.3). An area which if capitalised on could offer several operational advantages such as improving the efficiency, stability and robustness of the system
2 different control methods were quickly identified: PI Control and Sliding Mode Control (SMC). From my 2nd year studies I was already very familiar with PI control. However sliding mode control could improve system performance when operating between its modes of operation. This is due to sliding mode control using discrete sliding rules in which the system operates through both continuous and discrete modes. This would provide considerably more robust control of the system but at a cost of added complexity. Due to this complexity it was decided that PI control was the way forward for developing the system initially with the implementation of SMC now forming the basis of my 3rd year project.
Participating in UROS has been invaluable allowing me to develop key skills, both in terms of the engineering involved and in project management. Even from the early stage of preparing an application to completing my project, the entire experience has prepared me for continuing research into the HEESS moving forwards. It has provided me with a unique insight into conducting research and taught me key communication skills which were essential in facilitating the research, which will serve me well through the remainder of my studies and beyond.
*To view Billy’s project poster, please click on the thumbnail below:
